Principe général




Expectation-Maximization
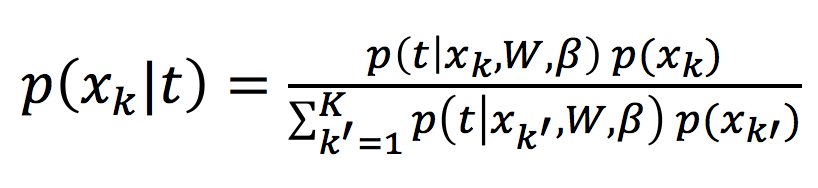
Expectation: calcul des responsabilités
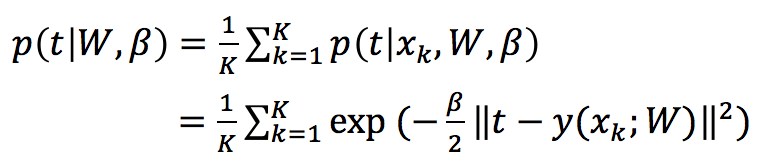
Maximization: optimisation des paramètres W et β
Répéter les deux étapes jusqu'à convergence


M = Nombre de centres RBF
K = Nombre de points sur la grille
σ = Variance des RBF
λ = Coefficient de régularisation
F = Nombre de facteurs pour la PCA
+ mode d'initialisation de W